啊……
牛顿曾经说过,球对称行星对球外一点的引力等价于其所有质量集中于球心,因为基本上所有天体都是球,所以它们之间的作用大概就是简单的二次反比力。
但这样就完了岂不是很没有逼格……于是就有了这篇文章。
写了写,感觉全塞一篇里太长了,所以分成几个部分。第一部分讨论天体因自转和潮汐作用产生的形变,以及因这形变产生的额外引力势。
天坑预感……不知道什么时候能写完……
警告:文中有很多很长的公式。很长是多长呢?
~~~~~~~~~~~~~~~~~~~~我是很长的公式~~~~~~~~~~~~~~~~~~~~
大概有这么长。如果上面一行被换行了,说明显示器宽度不够,可以试试调低缩放比例,或者手机横屏什么的……
————2025.01更新:加了个设定让公式可以自动按显示宽度缩放了,这样至少不会突破屏幕看不全。不过窄屏还是会让公式变得很小(
第一章 高中物理学:行星因自转或潮汐产生的扁率
考虑一个质量为\(M\),半径为\(R\)的球体行星(如下图虚线)。给它一个自转角速度\(\omega\),使得它产生形变(如下图实线)。
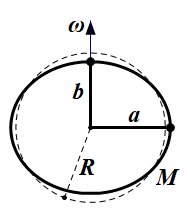
首先假设此时行星的引力仍然等价于质点引力\(\vec g=-GM\vec r/r^3\)。
再假设形变之后是一个椭球,其赤道半径(长轴)为\(a\),极半径(短轴)为\(b\)。至于为什么是个椭球,都是细节不要在意……其实严格的等势面并不是椭球,但可以用一个椭球来进行一阶近似,而且这样做相当方便。也就是说不做这个近似就没法玩了……
写出赤道和极点的等势方程\[-\frac{GM}{a}-\frac{1}{2}\omega^2a^2=-\frac{GM}{b}\]
注意我们有一阶近似,也就是说假设扁率是个小量,\(a\)、\(b\)和\(R\)差得不多:\[\frac{1}{2}\omega^2a^2=\frac{GM}{b}-\frac{GM}{a}\approx -\frac{GM}{R^2}(b-a)\]
可以直接算出扁率\[f_\omega=\frac{a-b}{a}=\frac{\omega^2R^3}{2GM}\]
很好。这就是高中物理告诉我们的自转引起的行星扁率。
接下来继续计算潮汐作用:
仍然考虑那个质量为\(M\),半径为\(R\)的球体行星。这次不给它角速度了,而是在它旁边距离为\(r\)(从行星中心算起)的地方放置一个质量为\(m\)的质点,给它一个潮汐力使得它形变。
首先说明什么是潮汐力,如图:
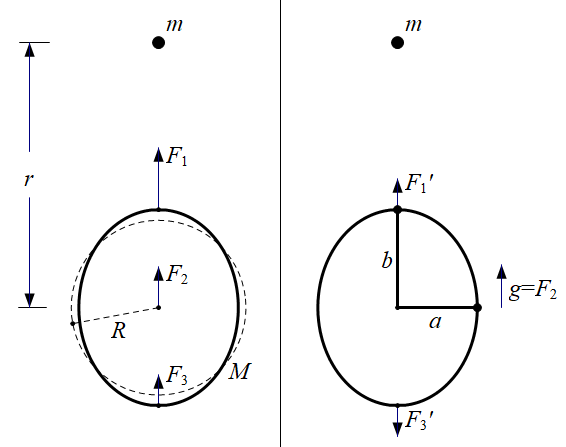
\(m\)在\(M\)各处分别造成引力\(\vec F_1\),\(\vec F_2\)和\(\vec F_3\),平均起来大概是\(\vec g=\vec F_2=Gm\vec r/r^3\)。这个平均引力使整个\(M\)具有加速度\(\vec g\),于是\(M\)参考系中就有一个等效的惯性力\(-\vec g\),潮汐力就是\(m\)的引力被这个惯性力\(-\vec g\)抵消后剩下的力。
在潮汐力作用下,行星形变之后仍然假设其是一个椭球,赤道半径为\(a\),极半径为\(b\)。注意现在赤道半径是短轴,极半径是长轴,和刚刚讨论自转时刚好相反。这是为了保证无论何种情况下,行星都拥有关于极轴的轴对称性,也就是说行星椭球总是\(a\times a\times b\)的。
仍然写出赤道和极点的等势方程
\[-\frac{GM}{a}-\frac{Gm}{\sqrt{r^2+a^2}}=-\frac{GM}{b}-\frac{Gm}{r-b}+b\cdot\frac{Gm}{r^2}\]
移项
\[\frac{GM}{b}-\frac{GM}{a}=\left(\frac{Gm}{\sqrt{r^2+a^2}}-\frac{Gm}{r-b}\right)+b\cdot\frac{Gm}{r^2}\]
等式左侧取一阶近似,\(a\approx b\approx R\);对等式右侧,假设\(a\),\(b \ll r\),将括号里的算式展开到二阶小量(第一阶被等效惯性力引起的势能项消掉了)
\[-\frac{GM}{R^2}(b-a)=\left(-\frac{Gm}{r^2}\cdot b-\frac{Gm}{r^3}\cdot b^2-\frac{Gm}{2r^3}\cdot a^2\right)+b\cdot\frac{Gm}{r^2}\]
整理可得扁率
\[f_m=\frac{a-b}{a}=-\frac{3GmR^3}{2GMr^3}\]
完毕。这就是高中物理计算出来的潮汐力造成的行星扁率。这个扁率是负的,因为潮汐力把行星拉成了一个长椭球(而自转会把行星压成扁椭球,具有正的扁率)。
第二章 形变的矩阵表示与叠加
刚刚我们分别对自转和潮汐影响算出了行星扁率,但只有一个扁率是不够的。实际中的行星不光有自转,同时还受到不止一个别的行星对它造成的潮汐影响。这一章讨论这些形变如何表示与叠加。
还是考虑质量为\(M\),半径为\(R\)的球体行星。如果它受到某种作用变成了赤道半径为\(a\),极半径为\(b\)的椭球体,那么取其极轴为\(z\)轴建立坐标系,可以写出变换矩阵
\[T=
\begin{pmatrix}
a/R & 0 & 0 \\
0 & a/R & 0 \\
0 & 0 & b/R
\end{pmatrix}\]
显然,如果\(P\)是半径为\(R\)的球体行星上一点,那么\(TP\)就是它在变形后的椭球体行星上对应的点。
如果要求变形过程行星的体积(或密度)不变,而且要求扁率为\(f\),则可以写出关于\(a\)和\(b\)的方程:
\[a^2b=R^3, \frac{a-b}{a}=f\]
解得\(a/R=(1-f)^{-1/3}\),\(b/R=(1-f)^{2/3}\)。
当\(f\)是小量时,有\(a/R\approx 1+f/3\),\(b/R\approx 1-2f/3\)。此时定义\(C=T-I\),则
\[C=
\frac{1}{3}\begin{pmatrix}
f & 0 & 0 \\
0 & f & 0 \\
0 & 0 & -2f
\end{pmatrix}=\left(\frac{I}{3}-\hat z\hat z\right)f\]
注意到\(C\)与扁率\(f\)是同阶小量。称这个\(C\)为形变矩阵。
以上讨论中行星是沿着\(z\)轴被压扁的,如果换成任意其他方向\(\vec r\)呢?处理方法是直接的:首先以\(\vec r\)为\(z’\)轴建立新的坐标系,在新的坐标系中写出如上\(T\)和\(C\),然后将结果变换到原来的坐标系中。这里直接给出结果:行星沿\(\vec r=(x,y,z)^T\)方向受到扁率\(f\)影响时,
\[\begin{aligned}
C(\vec r,f)&=\left(\frac{I}{3}-\frac{\vec r\vec r}{r^2}\right)f\\
&=\left(\frac{1}{3}\begin{pmatrix}1 & 0 & 0\\0 & 1 & 0\\0 & 0 & 1\end{pmatrix}-\frac{1}{x^2+y^2+z^2}\begin{pmatrix}xx & xy & xz\\yx & yy & yz\\zx & zy & zz\end{pmatrix}\right)f
\end{aligned}\]
这就是形变的矩阵表示形式。将第一章的结论写成矩阵形式就是
\[C_\omega=C(\vec \omega,\frac{\omega^2R^3}{2GM})\\
C_m=C(\vec r,-\frac{3GmR^3}{2GMr^3})\]
最后的问题就是不同的形变怎么加起来……一个朴素的想法是,既然球体行星上一点\(P\)在一种形变作用\(C_1\)影响下跑到了\(T_1P\),那么另一种形变作用\(C_2\)叠加上去应该会让它跑到\(T_2T_1P\)。听起来非常有道理,所以它肯定是正确的(我不会证我们以后会数值验证这个结论)。
所以合形变矩阵为\[\begin{aligned}C&=T_2T_1-I\\&=(I+C_2)(I+C_1)-I\\&=C_1+C_2+C_2C_1\\&\approx C_1+C_2\end{aligned}\]
其中\(C_1C_2\)是高阶小量,略去。
所以结论非常简单~~~对不同的形变\(C_i\),其叠加即相当于将形变矩阵直接叠加\(C=\sum_i{C_i}\)。形变的效果为将球体行星上的点\(P\)移动到\((I+C)P\)。
再多说两句。矩阵\(C\)是零迹对称矩阵,这个性质在以后的推导中有用。
另外,虽然求单个扁率影响下的\(T\)时保证了行星体积不变,但由于之后过程中省略了一些高阶小量,球体行星经过变换矩阵\((I+C)\)作用后可能有略微的体积改变。为了消除这一改变,可以使用修正的变换矩阵
\[T=\frac{I+C}{[\det(I+C)]^{1/3}}\]
第三章 形变附加势场及其对形变的反影响
啊……终于到这一章了。
之前的计算基于一个假设,行星本身的引力势场仍然是质点势,它与其他影响因素共同确定了行星的等势表面。但实际上形变会改变行星自身势场,而自身势场的改变会进一步作用于行星等势面,产生新的形变,然后无限循环……最终会平衡在某个位置。本章讨论形变引起的附加势,以及考虑这附加势之后的形变平衡位置。
先计算形变附加势。考虑半径为\(R\)的球对称行星,其内部距中心为\(r\)处的密度为\(\rho(r)\)。有给定形变\(C\)作用其上,取行星表面外一点\(\vec r_0\),则可写出势能
\[\phi(\vec r_0)=-\int_{|\vec r’|\lt R}\frac{G\rho(|\vec r’|)dV’}{|T\vec r’-\vec r_0|}\]
其中\(\vec r’\)是形变前的行星内一点。势能与形变前的差别就在被积量的分母上,\(\vec r’\)跑到了\(T\vec r’\)的位置。由于形变是保证体积与密度不变的,所以质量微元仍然可以写成\(\rho(|\vec r’|)dV’\)。注意到\(C=T-I\)是一个小量,可以做展开:
\[\begin{aligned}
\phi(\vec r_0)=&-G\int\rho(|\vec r’|)dV’\cdot\frac{1}{|\vec r’-\vec r_0+C\vec r’|}\\
=&-G\int\rho(|\vec r’|)dV’\left(\frac{1}{|\vec r’-\vec r_0|}-\frac{\vec r’-\vec r_0}{|\vec r’-\vec r_0|^3}\cdot C\vec r’\right)\\
=&-G\int\frac{\rho(|\vec r’|)dV’}{|\vec r’-\vec r_0|}+G\int\frac{(\vec r’-\vec r_0)\cdot C\vec r’}{|\vec r’-\vec r_0|^3}\rho(|\vec r’|)dV’\\
\end{aligned}\]
注意最后一个式子中的第一项就是原来的球对称行星的引力势,可直接使用牛顿的结论;而第二项中矩阵\(C\)是常量,可以提出来,写成张量双点积的形式:
\[\phi(\vec r_0)=-\frac{GM}{|\vec r_0|}+GC:\int\frac{(\vec r’-\vec r_0)\vec r’}{|\vec r’-\vec r_0|^3}\rho(|\vec r’|)dV’\]
其中\(M=4\pi\int_0^R r^2\rho(r)dr\)是行星的总质量。
定义\(\Delta\phi=\phi+GM/r_0\)是形变造成的附加势,可以看到\(\Delta\phi\)中有一个比较复杂的积分。为了计算这个积分,首先以\(\vec r_0\)为\(z\)轴建立一个新坐标系,在此坐标系中被积函数有轴对称性比较好算。注意,这个积分的结果是张量而非标量,所以在这个坐标系中积完得把结果换回原坐标系,这样才能正确计算和\(C\)的双点积。
在新坐标系中使用球坐标换元,\(dV’=r^2\sin\theta drd\theta d\phi\),有
\[\vec r_0=(0,0,r_0)^T\\
\vec r’=(r\sin\theta\cos\phi,r\sin\theta\sin\phi,r\cos\theta)^T\\
|\vec r’-\vec r_0|=\sqrt{r^2+r_0^2-2rr_0\cos\theta}\]
以及那个张量,写出来比较吓人
\[
\begin{aligned}
&(\vec r’-\vec r_0)\vec r’=\\&\begin{pmatrix}
r^2\cos^2\phi\sin^2\theta & r^2\cos\phi\sin\phi\sin^2\theta & r^2\cos\phi\cos\theta\sin\theta\\
r^2\cos\phi\sin\phi\sin^2\theta & r^2\sin^2\phi\sin^2\theta & r^2\cos\theta\sin\phi\sin\theta\\
r(r\cos\theta-r_0)\cos\phi\sin\theta & r(r\cos\theta-r_0)\sin\phi\sin\theta & r(r\cos\theta-r_0)\cos\theta
\end{pmatrix}
\end{aligned}
\]
计算原积分,过于详细的过程就不写了(留做习题丢给Mathematica)
\[
\begin{aligned}
&\int\frac{(\vec r’-\vec r_0)\vec r’}{|\vec r’-\vec r_0|^3}\rho(|\vec r’|)dV’\\
=&\int_0^R r^2\rho(r)dr\int_0^\pi \frac{\sin\theta d\theta}{|\vec r’-\vec r_0|^3}\int_0^{2\pi}(\vec r’-\vec r_0)\vec r’d\phi\\
=&\int_0^R r^2\rho(r)dr\int_0^\pi \frac{\pi\sin\theta d\theta}{|\vec r’-\vec r_0|^3}\begin{pmatrix}
r^2\sin^2\theta & 0 & 0\\
0 & r^2\sin^2\theta & 0\\
0 & 0 & 2r(r\cos\theta-r_0)\cos\theta
\end{pmatrix}\\
=&\frac{4\pi}{3r_0^3}\int_0^R r^4\rho(r)dr\begin{pmatrix}
1 & 0 & 0\\
0 & 1 & 0\\
0 & 0 & -2
\end{pmatrix}\\
=&\frac{4\pi}{r_0^3}\left(\frac{I}{3}-\hat z\hat z\right)\int_0^R r^4\rho(r)dr
\end{aligned}
\]
还剩下最后一层积分,仅和行星内部物质密度分布有关,是一个目前无法确定的常数,拥有\(MR^2\)的量纲。定义无量纲量
\[A=\frac{4\pi}{MR^2}\int_0^R r^4\rho(r)dr\]
并且将积分结果变换到原来的坐标系,即有
\[\Delta\phi(\vec r_0)=\frac{AGMR^2}{r_0^3}C:\left(\frac{I}{3}-\frac{\vec r_0\vec r_0}{r_0^2}\right)\]
注意到\(C\)是零迹的(见第二章),故\(C:I=0\);再用\(\vec r\)代替\(\vec r_0\)重写上式,即为
\[\Delta\phi(\vec r)=-\frac{AGMR^2}{r^5}\vec r\cdot C\vec r\]
这就是形变\(C\)在行星外一点\(\vec r\)处对行星引力势的影响,可以看到这个影响与\(C\)是成正比的。
接下来讨论考虑这一影响之后,行星等势表面应该重新平衡在何处。
继续考虑半径为\(R\)的球体行星。在外部势场\(\phi_{ext}\)作用下,仅考虑其质点势\(\phi_0=-GM/r\)与\(\phi_{ext}\)的平衡,可得行星形变\(C\),\(C\)的计算在前两章中已经给出。
选择球体行星在未形变时表面上任意两点\(P(\vec r_p),Q(\vec r_q)\),并假设形变量是小量,形变前后外部势变化不大,可依此写出等势方程:
\[\phi_{ext}(P)-\frac{GM}{|T\vec r_p|}=\phi_{ext}(Q)-\frac{GM}{|T\vec r_q|}\]
移项,展开,化简
\[\begin{aligned}
&\phi_{ext}(P)-\phi_{ext}(Q)\\
=&\frac{GM}{|T\vec r_p|}-\frac{GM}{|T\vec r_q|}\\
=&\frac{GM}{|\vec r_p+C\vec r_p|}-\frac{GM}{|\vec r_q+C\vec r_q|}\\
=&GM\left(\frac{1}{|\vec r_p|}-\frac{\vec r_p}{|\vec r_p|^3}\cdot C\vec r_p\right)-GM\left(\frac{1}{|\vec r_q|}-\frac{\vec r_q}{|\vec r_q|^3}\cdot C\vec r_q\right)\\
=&-\frac{GM}{R^3}\left(\vec r_p\cdot C\vec r_p-\vec r_q\cdot C\vec r_q\right)
\end{aligned}
\]
注意到
\[\begin{aligned}
\Delta\phi(\vec r_p)=&-\frac{AGMR^2}{|\vec r_p|^5}\vec r_p\cdot C\vec r_p\\
=&A\cdot\left(-\frac{GM}{R^3}\vec r_p\cdot C\vec r_p\right)
\end{aligned}\]
而\(\Delta\phi(\vec r_q)\)同理。故上述等势方程可写为
\[\phi_{ext}(P)-\phi_{ext}(Q)=\frac{1}{A}(\Delta\phi(\vec r_p)-\Delta\phi(\vec r_q))\]
假设考虑形变附加势的影响之后,行星形变会平衡在\(kC\),即原本形变量的\(k\)倍。那么,\(\Delta\phi\)也会变为原本的\(k\)倍。同时等势方程中的\(\phi_{ext}\)也要多出\(\Delta\phi\)的项。依此可以写出新的等势方程:
\[\phi_{ext}(P)+k\Delta\phi(\vec r_p)-(\phi_{ext}(Q)+k\Delta\phi(\vec r_q))=\frac{1}{A}(k\Delta\phi(\vec r_p)-k\Delta\phi(\vec r_q))\]
以上两个等势方程对照,可得
\[\frac{1}{A}+k=\frac{k}{A}\]
解得\(k=1/(1-A)\)。
最后做一总结:行星在因自转、潮汐等作用形变时,可以首先根据前两章公式计算出形变矩阵\(C\),在此形变下行星的质点势和外部势平衡。但实际中因为形变后的行星自身势场并不是质点势,所以实际形变量是\(kC=C/(1-A)\),其中:
\[A=\frac{4\pi}{MR^2}\int_0^R r^4\rho(r)dr\\
k=\frac{1}{1-A}\]
形变之后,在行星外一点\(\vec r\),行星的引力势为
\[\begin{aligned}
\phi(\vec r)=&\phi_0(\vec r)+\Delta\phi(\vec r;kC)\\
=&-\frac{GM}{r}-\frac{AGMR^2}{(1-A)r^5}\vec r\cdot C\vec r\\
=&-GM\left(\frac{1}{r}+\frac{(k-1)R^2}{r^5}\vec r\cdot C\vec r\right)
\end{aligned}\]
间章 一些数值计算
前面一通暴算猛于虎,到底结果精确与否还得拿实际数据检验。这里拿地球的数据算一算。
根据WGS84,地球赤道半径\(a=6378137\mathrm m\),扁率\(f=1/298.257223563\),自转角速度\(\omega=72.92115\times 10^{-6} \mathrm{rad/s}\),重力常数\(GM=3986004.418\times 10^8\mathrm{m^3/s^2}\)。
我们首先假设地球的扁率全是自转引起的,因为第二大的影响是月潮,最高也才米的量级,跟地球扁率导致的几十公里的半径差比起来不值一提。
可以计算地球的平均半径
\[R=(a^2b)^{1/3}=a(1-f)^{1/3}=6371000.79\mathrm m\]
根据第一章的公式,
\[f_\omega=\frac{\omega^2R^3}{2GM}=0.001724893\]
根据第三章的结论,地球最后会平衡到扁率为\(f=kf_\omega\)处,可以计算出\(k\)值
\[k=f/f_\omega=\frac{2GMf}{\omega^2R^3}=1.943779\]
这个\(k\)值是从实测扁率中推出的。然后我们用第三章中的公式理论计算\(k\)值,比较它和实测值的差别,来检验理论的精确性。根据PREM,地球内部的密度曲线可以用一堆间断的多项式来拟合,画出来大概如下图:
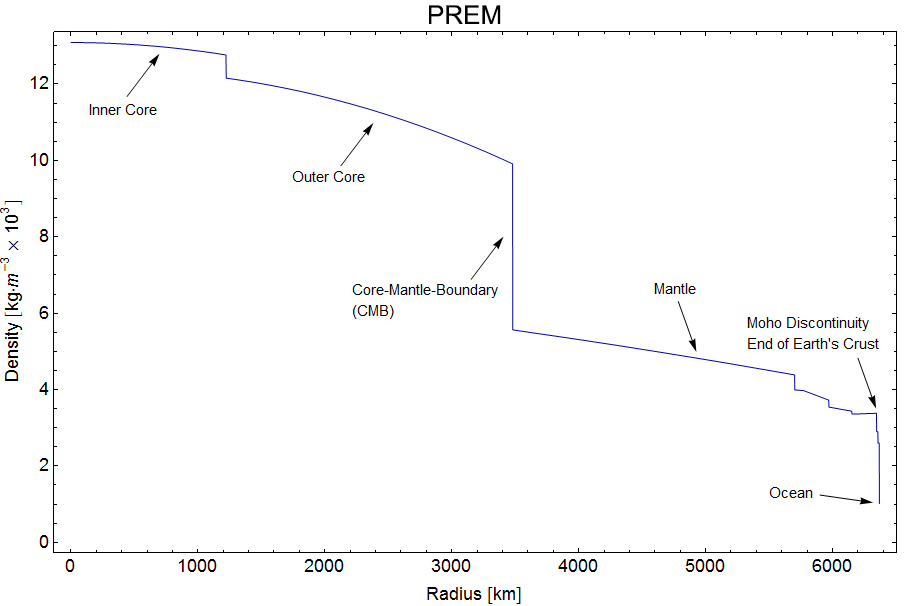
然后数值积分可以算出(过程略)
\[A=\frac{4\pi}{MR^2}\int_0^R r^4\rho(r)dr=0.49620\\
k’=\frac{1}{1-A}=1.98491\]
可以看到计算出的\(k’\)值很接近实际测到的\(k\)值,误差为\(2.116\%\)。反过来就是说如果使用前三章的理论来预测地球的扁率的话,误差只会有\(2.116\%\),这个精度是令人满意的。至于误差的来源可能是计算过程中舍掉的高阶小量,也可能是因为地球内部并不是处处都根据同一个矩阵\(C\)来形变——可以想象,在更加致密的地球核心区,形变可能稍小。
————————更新(2020.9.2):对误差的解释:
计算\(\Delta\phi\)时,我们假设了行星的形变矩阵处处为\(C\),并用行星内部密度的径向分布计算了无量纲量\(A\)。但行星的变形可能并不是在所有半径处都是一致的,所以实际的\(\Delta\phi\)的系数和我们所定义的\(A\)可能有出入,这里用另一个结构常数\(A_r\)表示实际量与定义量的比值。即:
\[\begin{aligned}
k=\frac{1}{1-AA_r}
\end{aligned}\]
根据此修正,地球的\(A=0.49620\),\(k=1.943779\),那么\(A_r=0.978513\)。这样就能解释地球扁率和地球内部物质径向分布之间的分歧。需要注意,该解释在此处只是引入了一个参数描述了误差,并没有额外的约束验证该解释的正确性。在本文的第二部分中我们会用地球的进动周期来验证该解释。
另外,由于潮汐的量级一般很小,且时标很短(天体动力时标,比地质时标和自转速率变化的时标短得多),所以行星会对潮汐表现出一定的刚性,并不是百分之百按照潮汐力去变形。故计算潮汐力的形变矩阵时,还需要乘以一个额外的小于\(1\)的经验因子,记为\(k_t\)。地球的\(k_t\approx 0.32\)。描述行星的刚性和物质分布还可以使用另一套叫做Love numbers的参数\(h_2\)和\(k_2\),它们与本文所用参数的大致关系为\(h_2=kk_t\),\(k_2=(k-1)k_t\)。
————————更新完毕
最后对\(A,k\)的取值范围做一些分析。首先观察\(A\)的表达式,会发现它其实是\((r/R)^2\)对行星质量的加权平均。在行星几乎所有质量都集中在核心时,\(A\approx 0\),\(k\approx 1\);在行星密度均匀分布时,计算得\(A=3/5\),\(k=5/2\)。那对一般行星自然就有\(1\le k\le 5/2\),且行星密度分布越集中于核心,\(k\)越接近1;密度分布越均匀,\(k\)越接近\(5/2\)。
根据地球、火星、木星、土星的实测扁率、自转角速度及重力常数,可以计算它们的\(k\)值,如下:地球\(1.94\),火星\(2.58\),木星\(1.56\),土星\(1.38\)。可见土星的物质分布最倾向于集中在核心,而火星完全是个奇葩:要达到大于\(5/2\)的\(k\)值,甚至需要表面密度比核心密度更高!
所以本文的最终结论是:火星的内部是中空的,里面藏着外星人
口胡。无论如何,本文的第一部分就写到这吧,之后会在第二部分中讨论动态形变以及形变引起的其他效果,比如转动惯量变化,天体间额外的力和力矩,潮汐摩擦等等。
“行星形变理论(1)”上的4条回复
啊!害怕😱
啊!害怕😱
啊!害怕😱
啊!害怕😱